
КАТАЛОГ
- Электронные компоненты, радиодетали
- Коммутация
- Оптоэлектроника
- Индикация
- Светодиоды осветительные
- Освещение
- Источники питания
- Датчики
- Корпусные и установочные изделия
- Провода, кабель, расходные материалы
- Измерительные приборы
- Паяльное оборудование
- Инструмент
- Промышленная автоматика
- Электричество, контроль, управление мощностью
- Электроника для дома и авто
Энкодеры Bourns
Как известно, энкодеры преобразовывают механическое движение ротора в какую-либо форму электрического сигнала и используются для определения углового положения, а также для определения скорости, направления и частоты вращения. С помощью энкодера также можно измерить длину и расстояние или установить перемещение инструмента. В отечественной радиоэлектронике их называют преобразователи перемещений.
В номенклатуру выпускаемых компанией Bourns энкодеров входят 3 типа изделий:
—контактные механические (используются в бытовой технике)
—бесконтактные оптические (используются в аудиооборудовании и ответственных промышленных применениях)
—бесконтактные магнитные (используются в робототехнике и сервоприводах)
| Квадратурные энкодеры | Абсолютные энкодеры | ШИМ-энкодеры | ||
| < 1 млн. поворотов | > 1 млн. поворотов | < 1 млн. поворотов | > 1 млн. поворотов | > 1 млн. поворотов |
| Контактные: EPS ECW ES PEC09 PEC11 PEC12 PEC16 PEL12 PES12 |
Магнитные: EMS22 Оптические: EM14 EN |
Контактные: EAW |
Магнитные: EMS22 |
Магнитные: EMS22 |
Каждая сфера применения (медицинская техника, робототехника, лабораторные приборы и т.д.) выдвигают свои требования к энкодерам, поэтому компания Bourns выпускает модели с разными характеристиками:
—контактные и бесконтактные, механические, оптические и магнитные
—инкрементальные, выход типа направление/шаг, абсолютные цифровые, абсолютные с ШИМ-выходом
—с разрешением до 1024 положений на оборот
—с долгим сроком службы до сотен миллионов оборотв
—герметичные до IP65 и негерметичные
—для интерфейсов HMI (пользователь-машина) и MMI (машина-машина)
—для монтажа на блок, в отверстия или поверхностного монтажа на плату
Чтобы правильно выбрать энкодер, надо взвесить достоинства и недостатки каждого принципа действия: контактного, бесконтактного оптического и бесконтактного магнитного.
Механические контактные энкодеры состоят из кодирующего элемента и скользящих контактов. При повороте вала скользящие контакты перемещаются и замыкают кодирующий элемент, который выполняет роль общего контакта.
Квадратурные энкодеры имеют два скользящих контакта, которые замыкают общий контакт со сдвигом в 90 градусов. Порядок следования сигналов определяет направление вращения, а число импульсов дает частоту вращения.
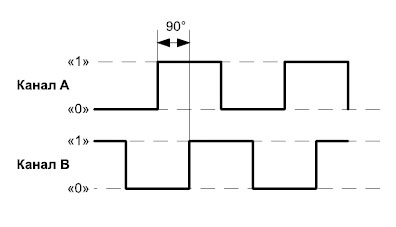
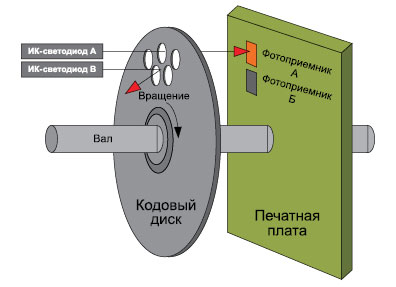
Бесконтактные оптические энкодеры состоят из кодирующего диска, источника света и фотоприемников. Через отверстия в диске свет от двух ИК светодиодов попадает на фотоприемники, где формируется переменный выходной сигнал. Частота сигнала пропорциональна скорости вращения ротора энкодера. Если энкодер квадратурный, то формируется два сигнала, сдвинутых на 90 градусов.
Бесконтактные магнитные энкодеры работают на эффекте Холла. При вращении вала происходит изменение магнитного поля и изменение напряжения датчика Холла. Постоянное вращение вала создает синусоидальное напряжение на выходе. Оно усиливается и преобразуется в сигнал нужной формы.
Заключение
Преимущества механических энкодеров раскрываются в их небольшой стоимости, простой схеме подключения и высокой устойчивости к статике. Однако любые механические элементы подвергаются изнашиванию, рок их службы не превышает десятка тысяч оборотов. Также, механические энкодеры имеют ограничения по разрешающей способности, частоте вращения и могут иметь дребезг контактов. Основная сфера их применения – интерфейс пользователь-машина (HMI).
Бесконтактные энкодеры отличаются высоким разрешением до 16 бит, срок их службы ограничен только износом подшипника и может достигать 100 млн. оборотов. Однако их стоимость значительно выше и они чувствительны к статике. Они применяются в MMI интерфейсах, машина-машина.
Дополнительная информация